Researchers at Northwestern University have unveiled a new 3D camera inspired by the unique vision system of jumping spiders.
The device, called SpiderCam, creates real-time depth maps while consuming less than one watt of power. The technology offers a promising solution for devices that need advanced vision without draining their batteries.
The camera was designed by studying how jumping spiders estimate distance before making highly accurate jumps. These tiny spiders have remarkable vision despite brains only about the size of a poppy seed. Their ability to judge distance efficiently inspired engineers to rethink how depth-sensing systems work.
Most modern 3D cameras rely on multiple viewpoints or projected light to calculate depth. These methods can provide accurate results but often require significant processing power and energy. They also depend on specialized hardware, which can increase costs and complexity.
READ ALSO: Scientists Establish Novel 2D “Health State Map” to Define Metabolic Health
SpiderCam follows a different approach based on how jumping spiders see the world. Unlike humans, which have one retina in each eye, jumping spiders possess several retinal layers within a single eye. Each layer captures the same scene at a slightly different focus level.
This natural design allows spiders to gather multiple versions of an image simultaneously. Some layers capture objects sharply while others record them with a slight blur. By comparing these differences, the spider’s brain can estimate distance without needing complex calculations.
Inspired by Nature’s 3D Camera
The Northwestern research team adapted this principle for a camera system. SpiderCam captures two images of the same scene simultaneously using slightly different focus settings. It then examines how edges and textures appear across both images.
A custom algorithm translates the differences in sharpness into depth information. The process enables the system to determine the distance to objects in real time. This method avoids the need for energy-intensive image matching or active light projection.
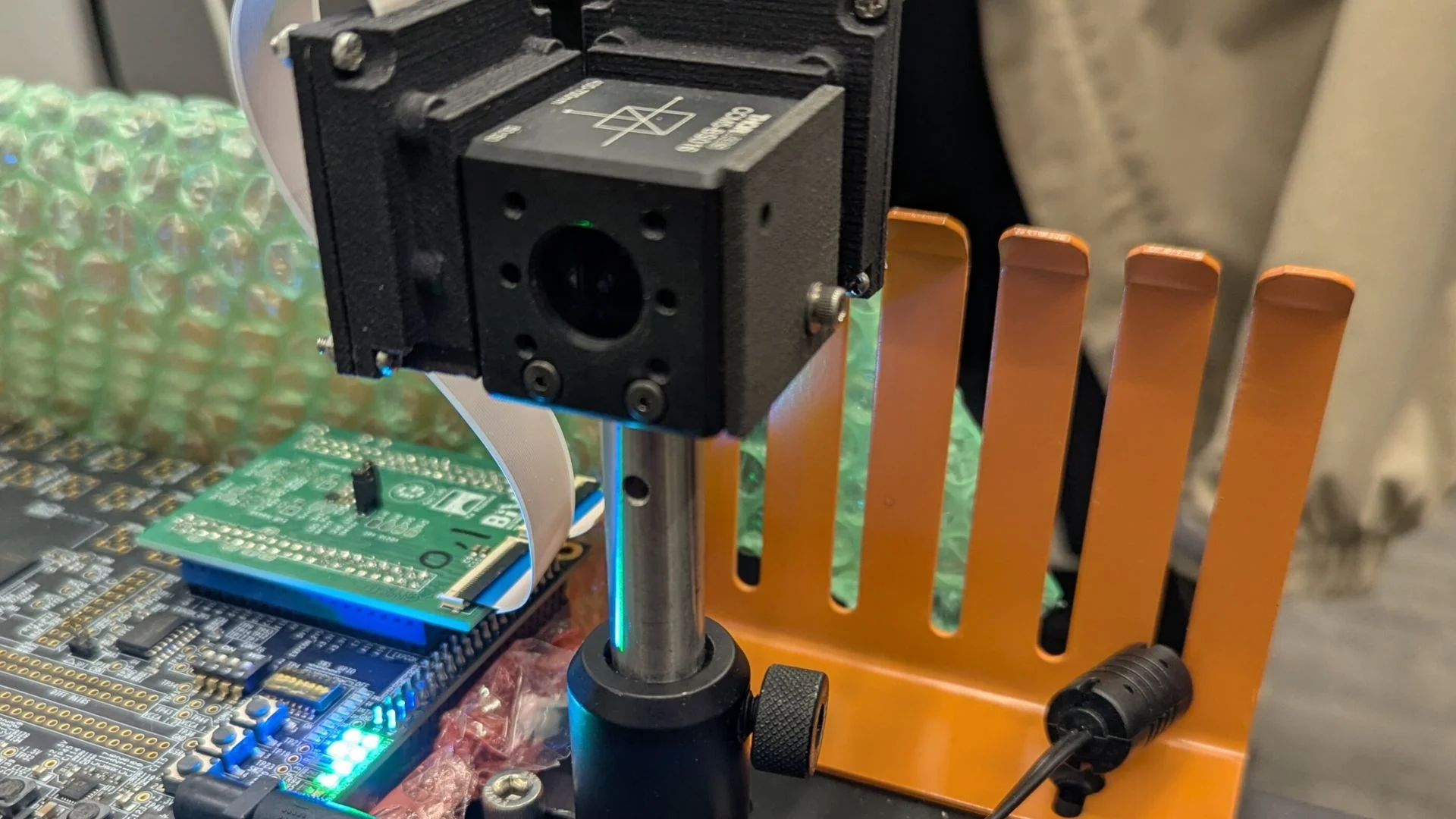
The researchers also focused on reducing power consumption at the hardware level. Instead of using a traditional processor, they embedded the algorithm directly into a field-programmable gate array(FPGA). This specialized chip is designed for efficient processing and can perform tasks using much less energy.
The resulting prototype generates depth maps at 32.5 frames per second. At the same time, it consumes only 624 milliwatts of power. According to the research team, this makes SpiderCam the first passive FPGA-based 3D camera system to operate at or below 1 watt.
READ ALSO: Artificial biosensor enables more precise detection of the body’s primary stress hormone
The project is being presented at the Computer Vision Foundation’s Conference on Computer Vision and Pattern Recognition (CVPR) in Denver. The findings have also been shared on the arXiv preprint server. The study was led by Assistant Professor Emma Alexander, an expert in bio-inspired computer vision at Northwestern University’s McCormick School of Engineering.
The development arrives at a time when demand for compact, energy-efficient sensing systems is growing. Devices such as drones, wearable electronics, smart glasses, and mobile robots often face strict power limitations. Lower-energy vision systems can extend operating time while reducing hardware requirements.
The technology also has potential applications in assistive devices and augmented reality systems. These products need continuous awareness of their surroundings to function safely and effectively. Efficient depth sensing can improve performance while preserving battery life.
WATCH ALSO: Humanoid robot folds towel autonomously after observing human
The research team plans to enhance the camera’s optics and widen its field of view in future versions. Engineers also want to integrate the technology into small robots and wearable platforms. Another goal is to develop a dedicated chip that could further reduce power consumption.
SpiderCam demonstrates how lessons from nature can help solve modern engineering challenges. Its success highlights a path toward bringing advanced 3D vision to places where conventional depth cameras are difficult to use.