Engineers have built a new kind of soft robot that bends, folds, and moves without using motors or bulky external systems. Instead, it relies on electricity and smart materials to power its motion.
The design takes inspiration from origami, the traditional Japanese art of paper folding, and combines it with modern materials science and flexible electronics.
The work comes from researchers at Princeton University, who developed a soft-rigid hybrid robot using a printable polymer. Their design eliminates the need for pumps, motors, or pneumatic systems, which are usually required to move soft robots. This could make such machines simpler, lighter, and more useful in real-world applications.
Soft robots are known for their flexibility. They can change shape, handle delicate objects, and move through tight or dangerous spaces. Because of this, scientists see them as promising tools for medical implants, drug delivery inside the body, and exploration in risky environments.
READ ALSO: Butterfly-Inspired Lattice Resists Impact and Absorbs Energy for Aerospace, Earthquake Safety
However, most existing designs still depend on rigid parts or external systems to function. That limits their efficiency and practicality. The Princeton team wanted to solve this problem.
In a study published on March 20 in the journal Advanced Functional Materials, researchers led by professors Emily Davidson and Glaucio Paulino introduced a new system. They used a 3D printer to build a robot that can repeatedly move and return to its original shape without damage.
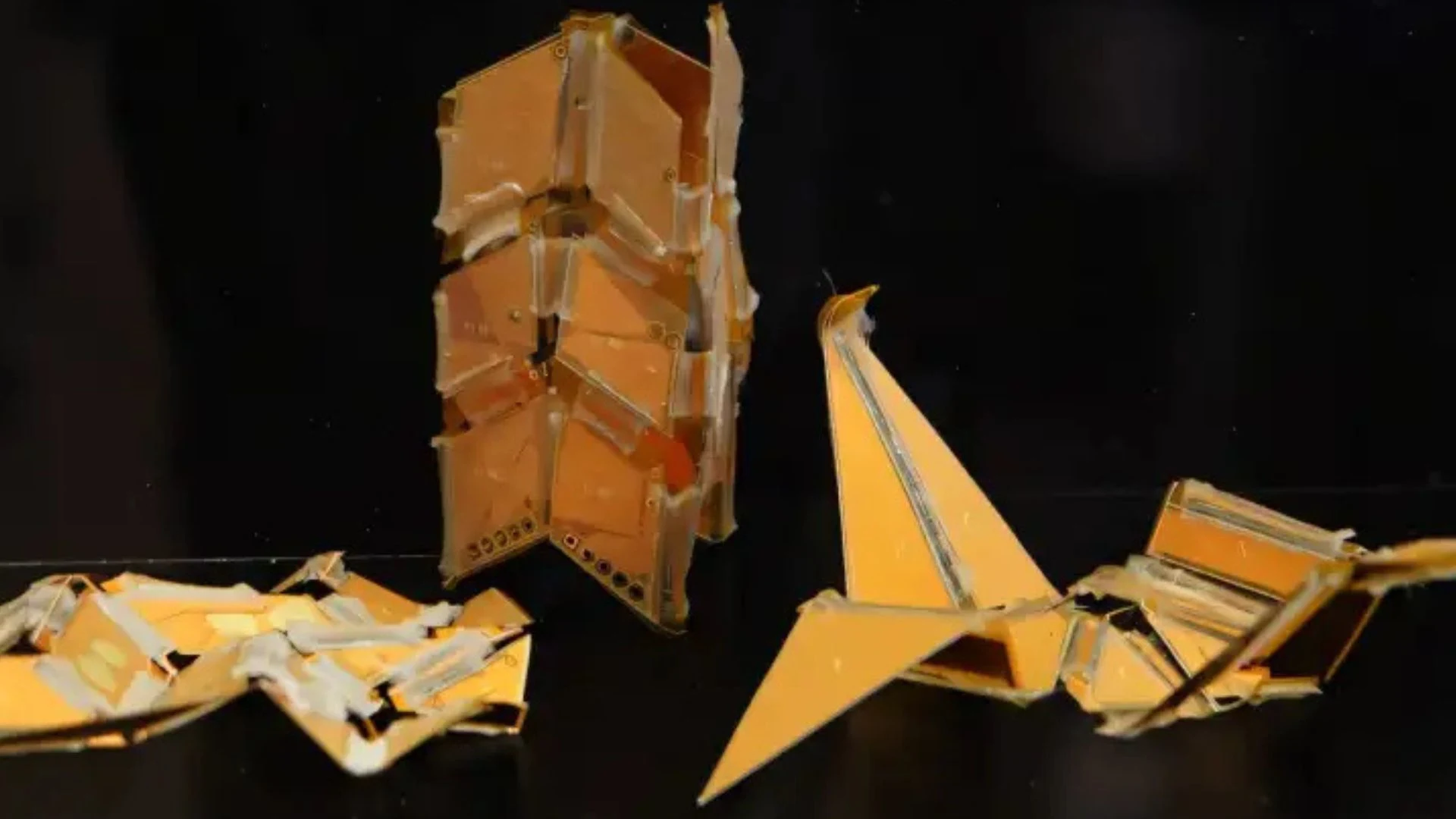
To demonstrate the concept, the team created a robot shaped like an origami crane. When powered by electricity, the crane flaps its wings. There are no motors involved. The motion comes from controlled heating inside the material, which causes specific parts to contract and bend.
This movement is precise and repeatable. The robot can go through many cycles without showing signs of wear or distortion. It can also follow programmable sequences, allowing its movements to be controlled in real time.
At the heart of this system is a special material known as a liquid crystal elastomer. This is a type of polymer that combines flexibility with an ordered internal structure. Its molecules are arranged in a specific pattern, which allows it to respond predictably when heated.
WATCH ALSO: Boston Dynamics Atlas humanoid robot demonstrates remarkable mobility, balance
The process begins with a customized 3D printer. The printer deposits the molten polymer in carefully designed patterns. During printing, the researchers control how the molecules inside the material are aligned. Each section of the printed structure has a specific orientation.
By arranging these sections in different ways, the team creates hinges within the material. These hinges are programmed to bend when heat is applied. This allows the robot to fold and unfold in controlled ways.
Professor Davidson explained that controlling both the molecular structure and the printing process was essential. Her team specializes in designing such materials and guiding their internal structure during fabrication. This expertise played a key role in making the system work.
Another major part of the design is the integration of flexible electronics. During printing, the researchers embed flexible circuit boards directly into the material. This removes the need for separate assembly steps and improves consistency.
These circuit boards are not just passive components. They actively control the robot’s movement.
Once embedded, the circuits can heat very specific areas of the polymer. This targeted heating triggers the material to contract as chosen. As a result, the robot bends along the programmed hinges. The system also includes temperature sensors that enable it to monitor and adjust its behavior in real time.
READ ALSO: Artemis II Returns: The Moon Mission That Went Farther Than Ever Before
This closed-loop control system ensures accuracy. Even if small errors occur during repeated movements, the sensors help correct them. According to Professor Paulino, this ability to compensate for errors is critical for the durability of soft robots.
To guide the robot’s motion, the team used mathematical principles derived from origami. These principles define how folding patterns behave and how structures can transform. Paulino’s group has been a pioneer in applying origami mathematics to engineering.
Their previous work includes medical implants, adaptive structures, and robots that can change shape in response to magnetic fields. They have also explored systems that can encode information and act like mechanical computers.
In this project, origami is not just an inspiration; it is a design framework.
To ensure that the robot folds only where intended, the researchers added lightweight fiberglass panels between the hinges. These panels reinforce certain areas while leaving the hinges free to move. This combination of soft and rigid elements gives the robot both flexibility and control. The project itself began as an undergraduate thesis.
David Bershadsky started working on the idea during his time at Princeton. He completed his degree in electrical engineering in 2024 and is now pursuing graduate studies at the University of Texas at Austin.
Bershadsky said he has long been interested in robotics. Earlier, he worked on swarm robotics in high school, where multiple small robots could change size and work together. When he joined Princeton, he wanted to explore new ways to create systems that could be easily transformed.
“I was looking for a way to easily and repeatedly create unit cells that could transform based on volume,” he said.
He believed that liquid crystal elastomers could provide a solution. He approached Professor Davidson with the idea, and she encouraged him to explore it further. She also suggested that he take Professor Paulino’s origami engineering class to better understand folding-based design.
That class played an important role in shaping the project.
One of the teaching assistants, Tuo Zhao, later became a co-author of the study. The collaboration among students, researchers, and professors helped bring together diverse fields, including materials science, robotics, and design.
Bershadsky described the project as a complex integration of multiple technologies.
“I think the big contribution is we showed integration of a complex system where we have local heating control,” he said. “We can control activation depending on where we heat.”
This integration is one of the key achievements of the work. Instead of focusing on a single component, the team combined materials, electronics, and software into one system. This makes the robot easier to manufacture and potentially more scalable.
To support future development, Bershadsky also created a software tool. This tool allows other researchers and designers to create their own versions of such robots. It is available on the lab’s GitHub and is included with the study’s dataset.
The software simplifies the design process. Users can define folding patterns, control heat, and program movement sequences. This opens the door for wider experimentation and innovation.
Despite the success, the project was not easy.
“People talk about system integration being the hard part,” Bershadsky said. “This entire project was the integration of a bunch of different technologies.”
That challenge highlights the importance of interdisciplinary work in modern engineering. Bringing together different fields often leads to new possibilities, but it also requires careful coordination.
WATCH ALSO: China sets world record, maglev train reaches 700km/h speed in 2 seconds
The result, however, is a system that pushes the boundaries of what soft robots can do. By eliminating motors and external systems, the Princeton team has created a simpler and more efficient design. The use of printable materials and embedded electronics also makes the system more adaptable.
In the future, such robots could be used in medicine, where small, flexible devices are needed to operate inside the human body. They could also be used in search-and-rescue missions, industrial inspections, or even space exploration.
The ability to program movement through material design is especially promising. It suggests a future in which machines are not just assembled but printed with built-in intelligence and functionality.
This origami-inspired robot is still at an early stage. But it shows how combining art, science, and engineering can lead to entirely new kinds of machines. And in this case, all it takes is heat, structure, and a carefully designed fold.