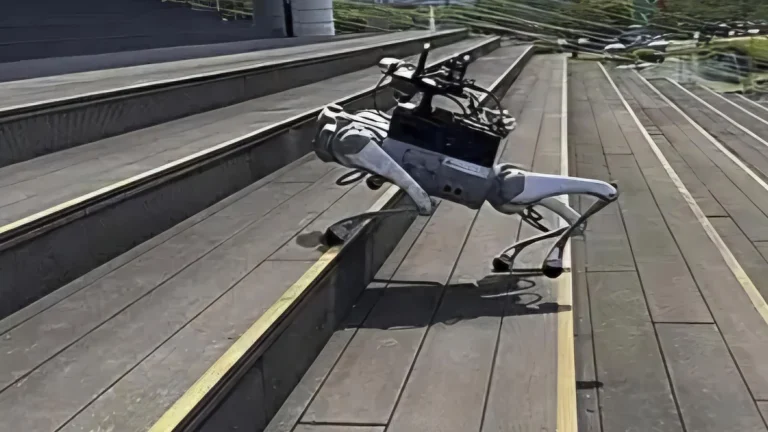
Robotics KAIST Robot That Sees Terrain And Chooses Its Own Path Conquers Obstacles With Ease Sanjukta Praharaj April 15, 2026