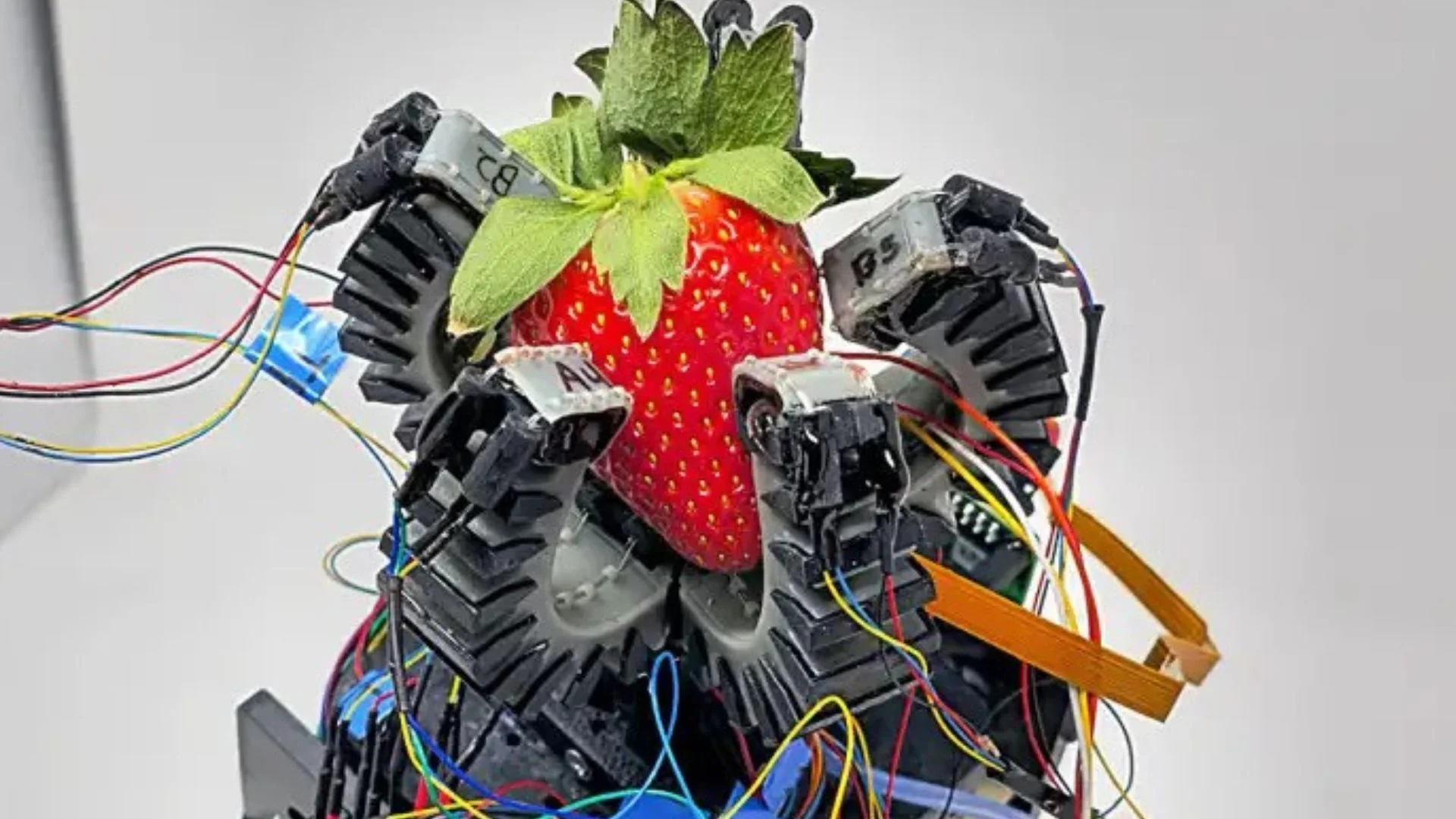
A team of researchers at Cornell University has developed a soft robotic gripper that can determine when fruit is ripe by touch and pick it without causing damage.
The technology focuses on one of the most delicate challenges in agriculture: handling fruit gently while ensuring it is harvested at the right time.
The study, published in Nature Communications, introduces a new approach where robots rely on physical feel rather than just visual cues. The research was led by Anand Mishra, a former postdoctoral researcher, under the guidance of Rob Shepherd.
READ ALSO: Shell Waste Turns CO₂ Into Fuel at Record Efficiency Without Toxic Chemicals
Farmers often rely on sight and smell to judge ripeness. But in many fruits, the most reliable signal is how the fruit feels. That is exactly what this robotic system focuses on. It uses soft, flexible fingers equipped with stretchable fiber-optic sensors to measure a fruit’s firmness.
To test the system, the team chose strawberries as their model fruit. According to Shepherd, strawberries offer a useful advantage.
“You can accurately tell when strawberries are ripe by their color,” he said. “So we trained our model to detect ripeness through touch, and then we confirmed it by checking the color.”
The robot measures stiffness when it comes into contact with the fruit. Based on this data, it can decide whether the fruit is ready to be picked. Mishra demonstrated that the robot could make accurate decisions solely through touch.
WATCH ALSO: Researchers from German have developed a diving robot that can easily collect underwater waste
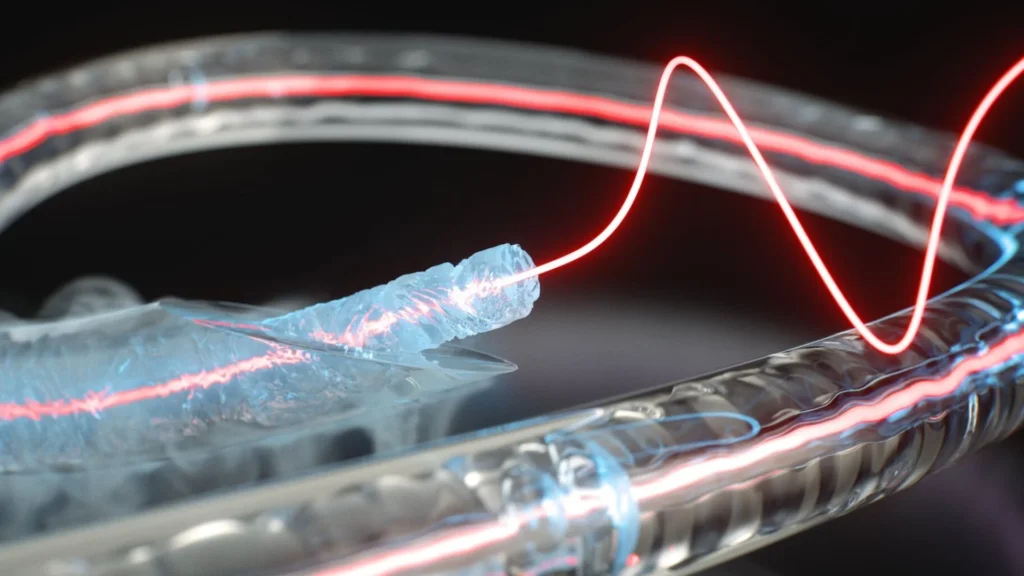
The gripper itself is designed to be extremely gentle. It has two types of fiber-optic sensors. One measures how much the robotic finger bends, and the other measures the pressure applied at the tip. Together, these sensors help the robot understand the shape and softness of the fruit.
Shepherd explained that the sensors are built into the material itself.
“The fiber-optic strain gauges have the same mechanical properties as the grippers,” he said. “It feels like the flesh is sensing the fruit, instead of using separate sensors.”
Once the robot confirms that the fruit is ripe, it does not pull it off as most machines do. Instead, it uses a small rotating mechanism in its wrist. This planetary gear system allows the gripper to gently twist the fruit off the vine. This reduces strain and prevents damage to both the fruit and the plant.
The team also added a small camera inside the gripper. This helps the robot locate fruit that may be hidden behind leaves or branches. While touch is the main feature, vision still plays a supporting role when needed.
READ ALSO: US Navy’s Long-Stalled 6th-Gen F/A-XX Stealth Fighter Heads Toward August Call
To build and test the system, Shepherd’s team worked closely with Marvin Pritts, a professor specializing in sustainable berry farming. This collaboration ensured that the technology fits real-world agricultural needs.
The implications of this work go beyond strawberries. Some fruits, such as avocados, pineapples, and pawpaws, do not show clear visual signs of ripeness. Shepherd highlighted pawpaws as a key example.
“The problem with pawpaws is you cannot see when they are ripe,” he said. “They ripen very fast, and if you miss the moment, they are gone. They also do not survive shipping well, which is why you rarely see them in stores.”
He believes this robotic system could change that by enabling precise and timely harvesting.
Beyond improving fruit picking, the technology may reshape how farms operate. Today, many farms grow crops in rows because machines are designed for that structure. But Shepherd sees a different future.
“Robots will allow us to do things we cannot do economically right now,” he said. “We can move away from strict row crops and grow different species together.”
This approach, known as mixed cropping, can improve soil health, reduce pest pressure, and reduce the need for chemicals. However, it is difficult to manage manually. Small, intelligent robots like this gripper could make it practical.
WATCH ALSO: World’s largest nuclear fusion research project ITER has reached a new milestone
“You can grow crops that support each other,” Shepherd said. “You can reduce pesticides and fertilizers. But managing that complexity requires advanced tools, and robots can help.”
The research highlights how soft robotics is moving beyond laboratories and into real-world applications. By combining gentle handling with smart sensing, this system offers a new way to efficiently harvest delicate crops.
In the long run, such technologies may not only reduce food waste but also make farming more flexible and sustainable without compromising the quality of the produce.