A research team has developed an intelligent artificial muscle that can sense force and movement while also generating motion in the same structure.
The system brings sensing and actuation together in one compact design inspired by how human muscles work. This development aims to make robots more responsive and easier to control in real-world tasks.
The technology was developed by researchers at Seoul National University, combining liquid crystal elastomers with liquid metal channels.
The work has been published in the scientific journal Advanced Materials, highlighting its relevance in advanced robotics research.
It focuses on improving how machines interact with their surroundings in a more natural and efficient way.
READ ALSO: Kratos Picks Indiana for New Hypersonic Testing Facility Under Project Helios
How Liquid Metal Artificial Muscle Works
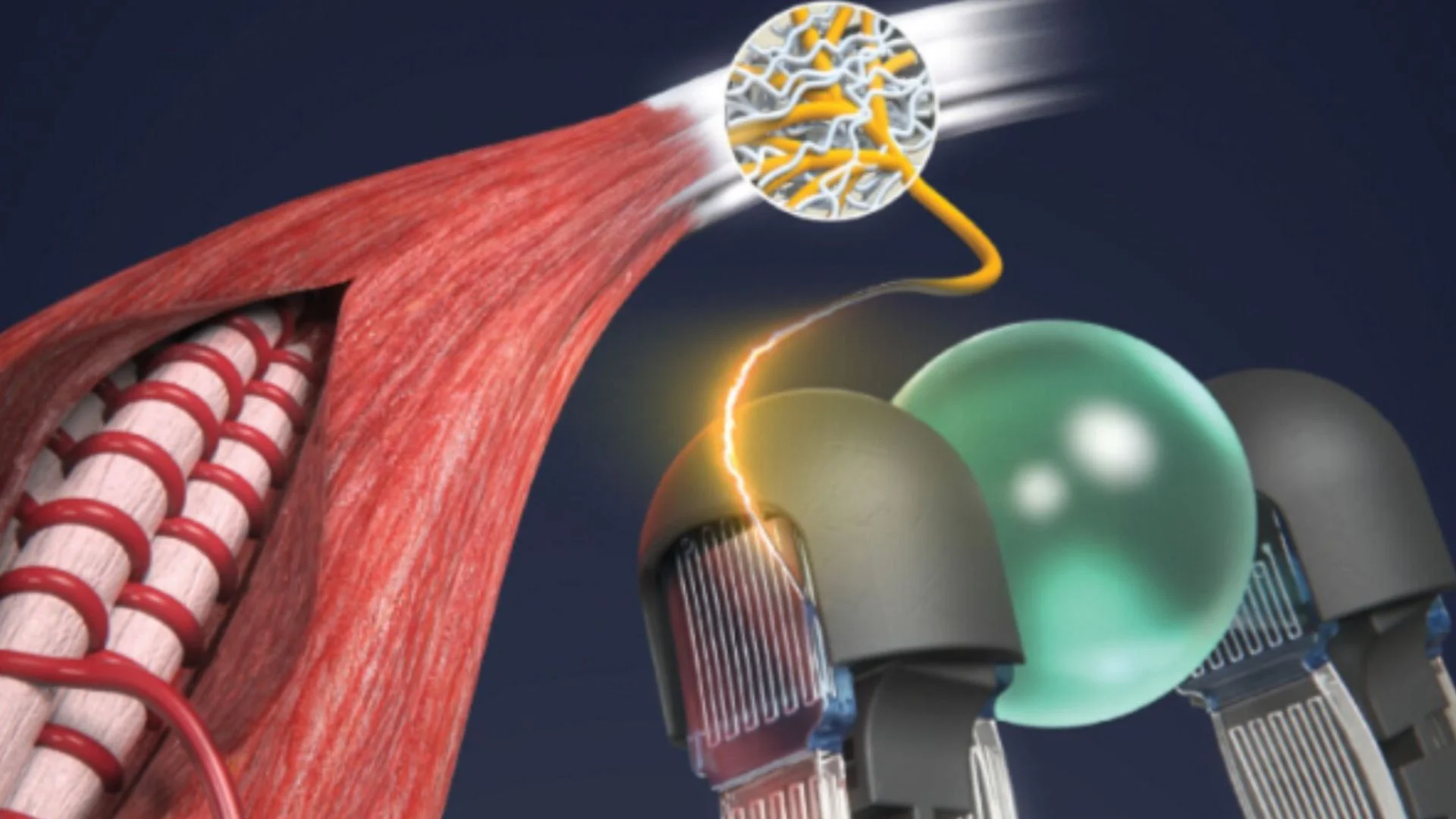
The artificial muscle is built from liquid-crystal elastomer materials arranged to mimic biological muscle and tendon systems. Two types of elastomers are connected in series, each playing a different mechanical role in the structure. This design helps the system bend, contract, and respond to external signals in a controlled way.
One part of the structure acts like a tendon, while the other behaves like a muscle that produces movement. Liquid-metal channels within the material generate heat when electricity is applied, triggering contraction. This allows the muscle to move without the need for traditional motors or bulky mechanical parts.
At the same time, the embedded liquid metal channels also detect changes in force and length. This means the system can measure how much it stretches or contracts while it is operating. Because of this dual function, no external sensors are required for movement monitoring.
The design closely follows the working principle of biological muscle-tendon systems. This makes the artificial muscle more compact and efficient compared to conventional robotic actuators. It also reduces system complexity by combining multiple functions into a single structure.
Real-Time Sensing and Robotic Applications
The research team tested the artificial muscle in robotic fingers and gripper systems. These robotic tools were able to pick up objects with precise control and adjust their grip in response to feedback. The system also identified differences in object stiffness and size during handling.
The ability to sense and act simultaneously improves the precision of robotic actions. It allows robots to respond instantly to changes in their environment. This is important for tasks that require delicate handling, such as gripping soft or fragile objects.
WATCH ALSO: Humanoid robot plays table tennis like human beings
The researchers also used an antagonistic muscle setup, where two artificial muscles work in opposite directions. This configuration improves control over contraction and relaxation movements. As a result, the system achieves faster and more accurate motion control.
Humanoid Robots and Future Development
The artificial muscle technology is expected to support the development of humanoid robots and soft robotic systems. It can also be useful in logistics automation, medical rehabilitation devices, and assistive technologies. These areas require machines that can safely interact with humans and handle delicate tasks.
The research team is currently working to improve the material’s cooling process to make it respond faster. They are also studying ways to optimize the structure for better performance and durability. Another focus is automating the fabrication process to improve production efficiency.
Jiyeon Cho, a Ph.D. researcher involved in the project, is continuing work on automated manufacturing methods for these artificial muscles. Her future research aims to improve scalability so the technology can be used in larger robotic systems. This could help move the concept closer to real-world industrial use.
This artificial muscle represents a step toward simpler and more intelligent robotic systems. By combining sensing and movement in a single material, it reduces the need for complex hardware and external sensors. The approach may change how future robots are designed and controlled.
READ ALSO: Meet Gabi: South Korea’s Robot Monk Joins Buddhist Rituals Ahead of Buddha’s Birthday
In the coming years, further improvements could make these systems faster, more durable, and easier to produce. If developed at scale, they could play an important role in humanoid robotics and human-assistive technologies.