IIT Gandhinagar unveils a new control method that enables flexible robots to move with high precision in confined spaces while significantly reducing computational complexity.
The approach, developed by researchers and published in Robotica, offers a simpler way to control soft, tendon-driven robots, making them more efficient for delicate and real-time applications.
Robots are often imagined as rigid machines with fixed joints and mechanical arms. They rotate, lift, and move in predictable ways. Popular fictional robots like Optimus Prime and Bumblebee fit this image well. But in real-world situations, especially in confined environments, such rigid robots face serious limitations.
Think about performing surgery inside the human body. The space is extremely tight. It is filled with delicate organs and soft tissues. A stiff robot would struggle to move without causing damage. It would also need larger openings to function, which is not always possible. This challenge has pushed scientists to design a different kind of robot.
READ ALSO: Spain’s Indra Unlocks Ka-Band for Submarines, Changing Naval Communication
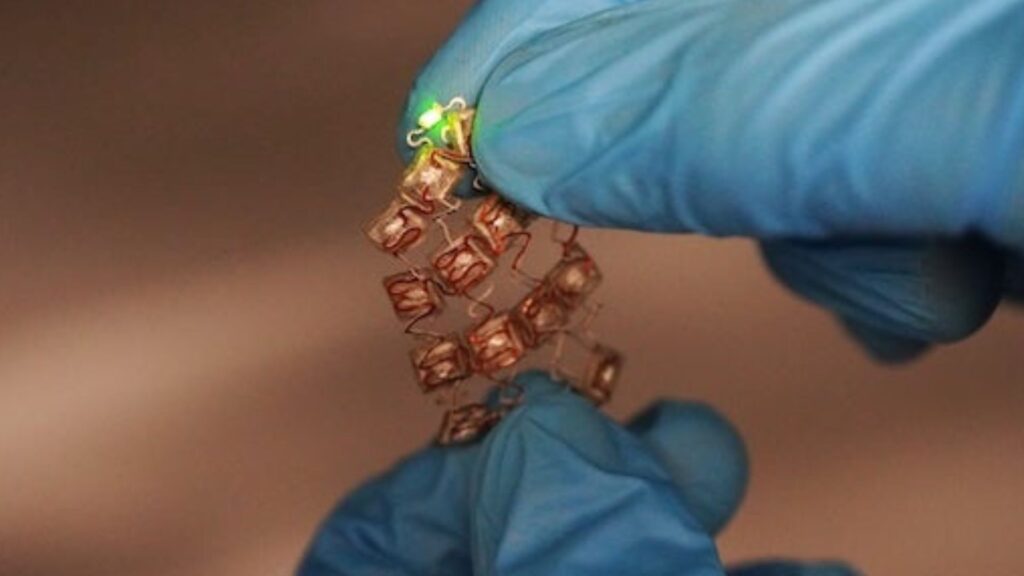
To solve this problem, researchers developed continuum robots. These robots are soft and flexible. They can bend smoothly and move through narrow and complex spaces. One important type is the Tendon-driven Continuum Robot, also known as TDCR.
TDCRs are designed to be compact and lightweight. They use thin wires, known as tendons, to control movement. These tendons run along a flexible backbone. When pulled, they bend the robot in different directions. The motion resembles natural movements seen in animals such as snakes, elephant trunks, and octopus tentacles.
This design makes TDCRs highly useful in places where traditional robots fail. They can enter tight corners and move with precision. At the same time, they are simple to build and relatively cost-effective.
Despite their advantages, TDCRs are not easy to control. The main reason is their infinite degrees of freedom. In simple terms, this means they can move in countless ways.
A rigid robot has a fixed number of joints. Its movements are limited and easier to predict. But a TDCR can bend and twist in many directions at once. The problem becomes even more complex when the robot has multiple sections.
WATCH ALSO: Explore Raytheon’s giant facility where it develops powerful naval radar SPY-6
Madhu Vadali explained that each section has several tendons. These tendons interact with each other. Pulling one tendon can affect the movement of another. This creates a complex puzzle for engineers trying to control the robot’s shape and position.
He said that choosing the right tendon to achieve a desired movement is difficult. The complexity increases as more sections are added to the robot.
Many existing control methods try to solve this issue. However, they require heavy computation. This makes real-time control difficult, especially in sensitive tasks like surgery.
To overcome these challenges, researchers at the Indian Institute of Technology Gandhinagar introduced a new concept called Virtual Actuation Space (VAS). Their findings were published in the journal Robotica.
VAS changes the way the robot’s movement is controlled. Instead of directly managing each tendon, it creates a simplified model of motion. It represents bending using just two parameters, direction and magnitude.
This approach reduces the need for complex calculations. It also allows each section of the robot to move independently. In traditional systems, moving one section often affects another due to interconnected tendons. VAS removes this limitation.
READ ALSO: Light Over Electricity: NIST Takes Photonic Chips to Deep Space, Reactors and Beyond
The result is a system that is easier to control, faster to compute, and more precise in movement.
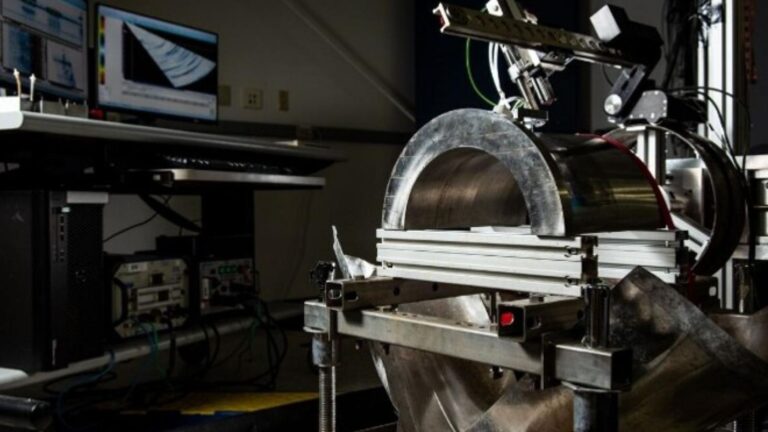
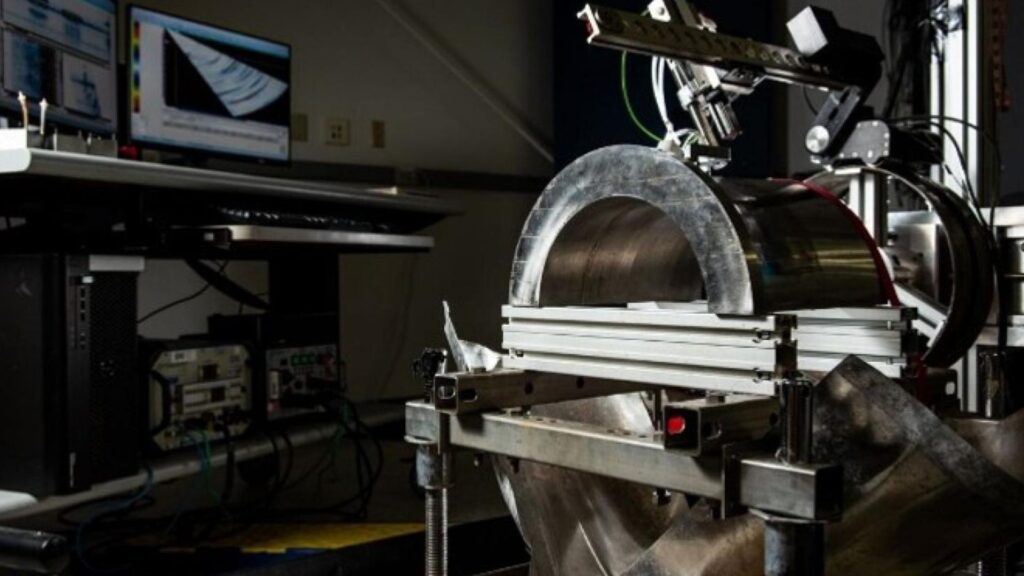
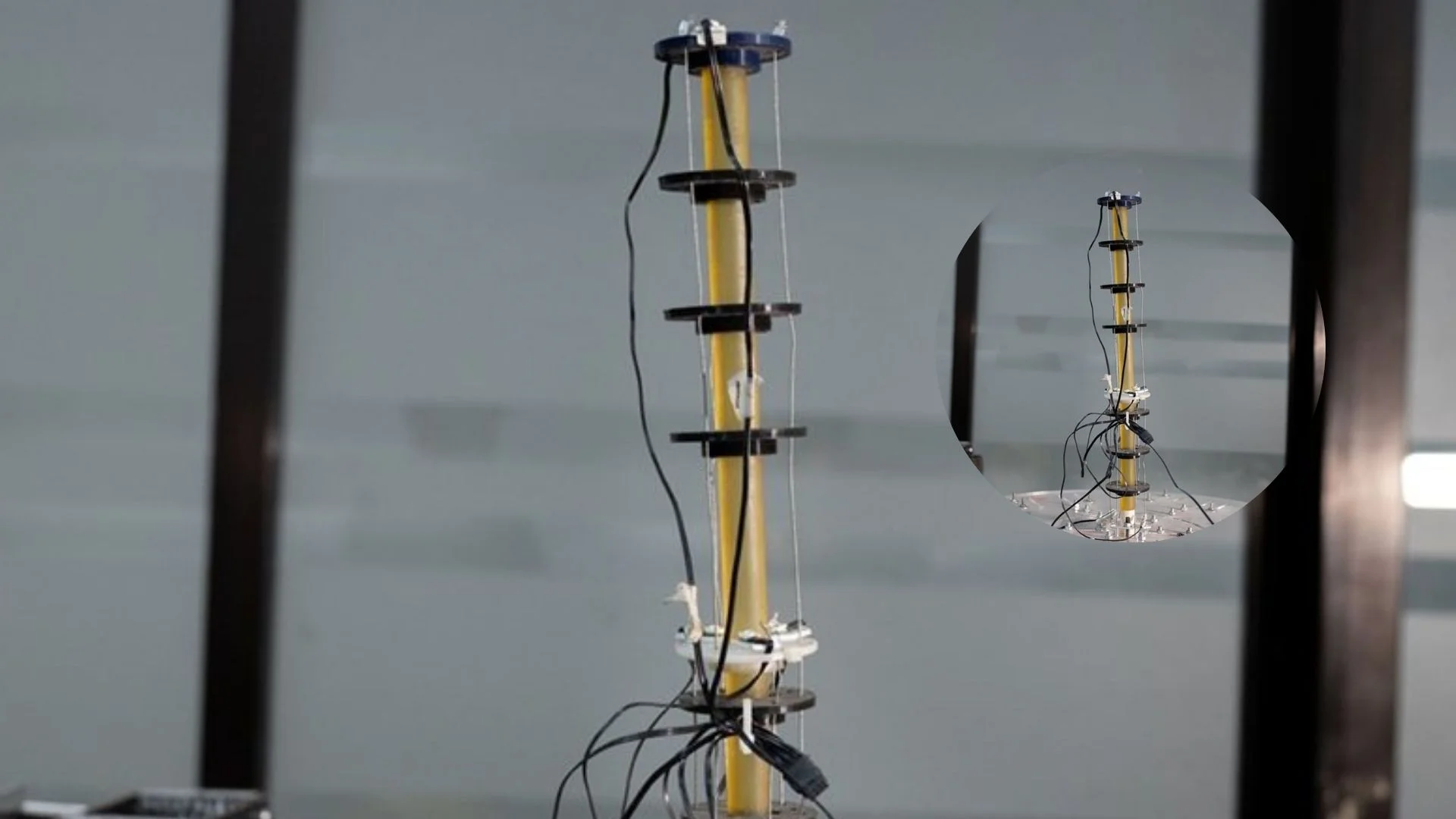
To test the effectiveness of VAS, the research team built a robotic arm with two sections. They used six motors to control the tendons. This setup allowed them to carefully study how the robot moves.
Md Modassir Firdaus, the first author of the study, explained that the motors adjusted tendon lengths to achieve accurate bending. This setup helped test how well the new control method works in real conditions.
The team used a high-resolution motion capture camera to track the robot’s movement. Small LED markers were placed on the robot. These markers helped the camera record its exact position.
Shail Jadav explained that a computer compared the robot’s actual position with the desired position. Based on this comparison, it adjusted the motors in real time.
In one test, the robot’s tip had to reach five points arranged in a pentagon shape. In another, it followed paths shaped like a flower, a spiral, a circle, and a curve.
In all these tasks, the error margin was less than 1%. This level of accuracy highlights the effectiveness of the VAS method.
Another key finding was the independence of the robot’s sections. One section could bend while the other stayed straight. This is similar to moving fingers without moving the wrist, or vice versa. This level of control is very important in real-world applications, especially where precision is critical.
The new framework has strong potential in many fields. One of the most important areas is medical surgery. In such procedures, even a small error can have serious consequences. A robot that moves precisely without unintended motion is highly valuable.
VAS ensures that one part of the robot does not interfere with another. This makes it safer and more reliable for delicate tasks. The system is also scalable. It can be applied to robots with more sections. This opens up possibilities in industrial automation and inspection tasks.
WATCH ALSO: Rolls-Royce tests world’s first high-speed marine engine powered by methanol
For example, these robots can be used to inspect aircraft engines or other machines with narrow internal spaces. They can also assist in maintenance work where human access is limited.
Dr. Vadali highlighted the broader impact of such research. He said that IIT Gandhinagar is building a strong and active robotics culture. Students and researchers are actively exploring new ideas and pushing boundaries.
He added that robotics is becoming a field driven by curiosity and innovation. Its applications are expanding across many areas that directly affect society.
From healthcare to industry, flexible robots are slowly changing how machines interact with the world. With simpler control methods like VAS, these robots are becoming more practical and efficient. The journey from complex equations to simple control marks an important step forward. It shows that sometimes, solving a difficult problem does not require more complexity but less.