Engineers at Tokyo’s Suzumori Endo Robotics Lab have developed a remarkably fluid, four-legged robot that replicates the muscular-skeletal system of a real canine. Dubbed the Canine Musculoskeletal Robot, the prototype moves with an organic, shock-absorbing gait by using pneumatic artificial muscles and a 3D-printed plastic skeleton, offering a new blueprint for agile, resilient robots inspired by biological design.
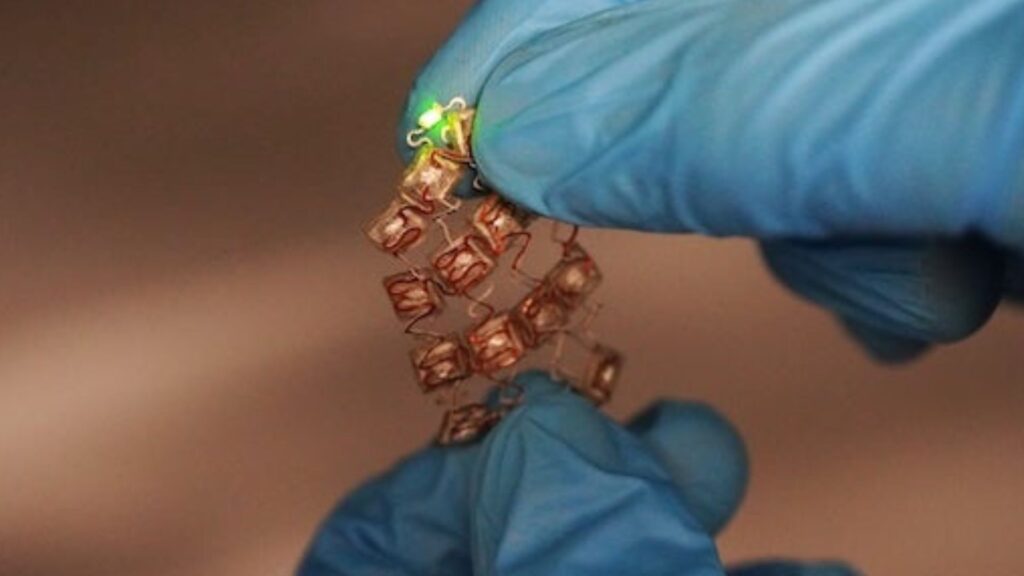
Forget the jerky, metallic clunk of traditional robot dogs. This project, led by researcher Hana Ito, aimed to decode and replicate the natural efficiency of a dog’s movement. The team, which included Shoma Tanaka and Koichi Suzumori, focused on a key biological feature: the “hammock” network of muscles and tendons in a dog’s shoulders that distributes the force of running. Their robot mimics this using bundles of thin, braided tubes called McKibben actuators, which contract like real muscles when inflated with compressed air, pulling on lightweight bone-like structures to create motion.
The result is a quiet, lightweight machine weighing less than five kilograms. Its smooth, shock-absorbing stride comes from the inherent flexibility of its air-driven system. Early tests show this bio-inspired design reduces disruptive vibrations by approximately 30% compared to robots with rigid, locked joints. As reported in the lab’s findings, this flexibility also allows the robot to dynamically adjust its stride length—a feature that may explain how real dogs maintain endurance over rough terrain.
READ ALSO: https://modernmechanics24.com/post/china-r6000-tiltrotor-flight-testing/
The construction philosophy prioritizes simplicity and adaptability. The skeleton is made from low-cost, 3D-printed plastic parts and off-the-shelf hinges, making it easy to modify and repair. The innovation lies in the miniaturization of the pneumatic muscles, shrunk down to pencil thickness for precise control. A small onboard compressor (quiet for lab use, though a backpack tank would be needed for fieldwork) provides the air, while sensors in the muscles create basic feedback loops to regulate tension and balance during movement.
Currently, the robot’s gaits are pre-programmed, but the lab plans to integrate cameras for real-time pathfinding in future iterations. While it won’t outrun a greyhound, its consistent pace and ability to handle small bumps demonstrate the potential of this musculoskeletal approach. It represents a significant shift away from rigid servo motors toward a softer, more adaptable paradigm for legged robotics.
The work at the Suzumori Endo Lab is more than an engineering exercise; it’s a step toward machines that can navigate the unpredictable real world with the grace and resilience of living creatures. By literally building a robot from the “muscles” out, they are uncovering principles that could lead to more efficient search-and-rescue robots, advanced prosthetics, or a deeper understanding of the biomechanics that have evolved in nature over millions of years.
READ ALSO: https://modernmechanics24.com/post/toxic-air-gold-minings-mercury-emissions-are-contaminating-africas-food-supply-researchers-say/